The LSM303 3D Accelerometers/Magnetometer Models are a system-in-package featuring a 3D digital linear acceleration sensor and a 3D digital magnetic sensor. These best-in-class eCompass devices enable superior PDR or unique use cases in emerging applications, including drones and personal navigation systems.
All full-scales available are fully selectable by the user. The device includes an I2C serial bus interface that supports standard and fast mode 100kHz and 400kHz.
Features
|
Here is a picture of the module I bought
{kind=link}
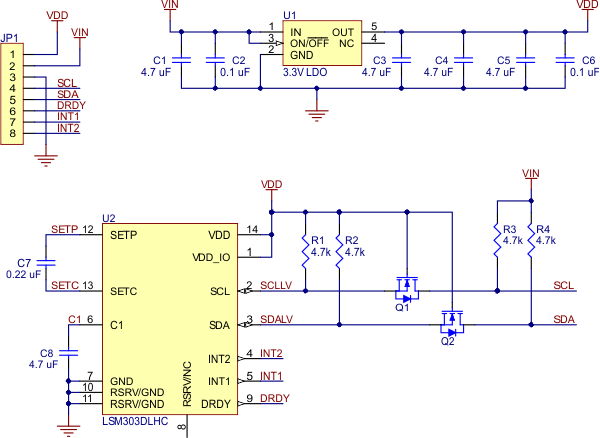
This is a schematic of a typical module such as the one above
{kind=link}
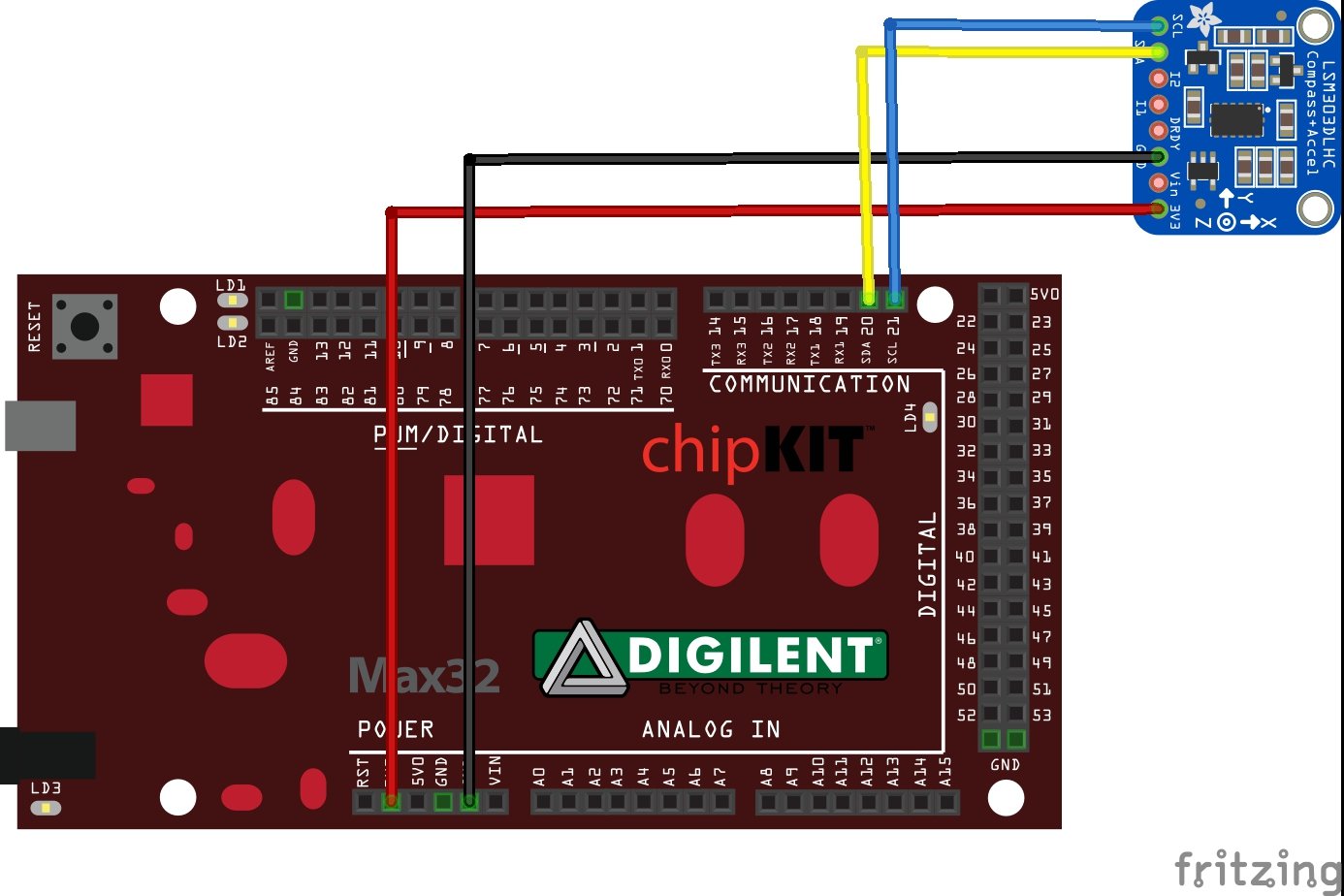
Now lets look at a layout showing how to connect the module to our Arduino
Schematic and layout
Quite a straightforward connection being an I2C device
{kind=link}
Code
This requires the LSM303 Adafruit to be added to the Arduino IDE via the library manager
This is the default magnetometer example
[codesyntax lang=”cpp”]
#include <Wire.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_LSM303_U.h>
/* Assign a unique ID to this sensor at the same time */
Adafruit_LSM303_Mag_Unified mag = Adafruit_LSM303_Mag_Unified(12345);
void displaySensorDetails(void)
{
sensor_t sensor;
mag.getSensor(&sensor);
Serial.println("------------------------------------");
Serial.print ("Sensor: "); Serial.println(sensor.name);
Serial.print ("Driver Ver: "); Serial.println(sensor.version);
Serial.print ("Unique ID: "); Serial.println(sensor.sensor_id);
Serial.print ("Max Value: "); Serial.print(sensor.max_value); Serial.println(" uT");
Serial.print ("Min Value: "); Serial.print(sensor.min_value); Serial.println(" uT");
Serial.print ("Resolution: "); Serial.print(sensor.resolution); Serial.println(" uT");
Serial.println("------------------------------------");
Serial.println("");
delay(500);
}
void setup(void)
{
#ifndef ESP8266
while (!Serial); // will pause Zero, Leonardo, etc until serial console opens
#endif
Serial.begin(9600);
Serial.println("Magnetometer Test"); Serial.println("");
/* Enable auto-gain */
mag.enableAutoRange(true);
/* Initialise the sensor */
if(!mag.begin())
{
/* There was a problem detecting the LSM303 ... check your connections */
Serial.println("Ooops, no LSM303 detected ... Check your wiring!");
while(1);
}
/* Display some basic information on this sensor */
displaySensorDetails();
}
void loop(void)
{
/* Get a new sensor event */
sensors_event_t event;
mag.getEvent(&event);
/* Display the results (magnetic vector values are in micro-Tesla (uT)) */
Serial.print("X: "); Serial.print(event.magnetic.x); Serial.print(" ");
Serial.print("Y: "); Serial.print(event.magnetic.y); Serial.print(" ");
Serial.print("Z: "); Serial.print(event.magnetic.z); Serial.print(" ");Serial.println("uT");
/* Note: You can also get the raw (non unified values) for */
/* the last data sample as follows. The .getEvent call populates */
/* the raw values used below. */
// Serial.print("X Raw: "); Serial.print(mag.raw.x); Serial.print(" ");
// Serial.print("Y Raw: "); Serial.print(mag.raw.y); Serial.print(" ");
// Serial.print("Z Raw: "); Serial.print(mag.raw.z); Serial.println("");
/* Delay before the next sample */
delay(500);
}
[/codesyntax]
Testing
Open the Serial Monitor window and you should see something like this
Magnetometer Test
————————————
Sensor: LSM303
Driver Ver: 1
Unique ID: 12345
Max Value: 0.00 uT
Min Value: 0.00 uT
Resolution: 0.00 uT
————————————
X: -15.73 Y: -20.00 Z: 40.31 uT
X: -15.82 Y: -20.27 Z: 40.61 uT
X: -15.91 Y: -20.36 Z: 40.82 uT
X: -15.45 Y: -20.09 Z: 40.51 uT
X: -6.91 Y: -9.64 Z: 56.33 uT
X: 6.18 Y: 28.36 Z: 69.39 uT
X: 10.55 Y: 48.55 Z: 62.35 uT
X: 34.64 Y: -15.45 Z: 45.41 uT
X: -21.55 Y: -0.09 Z: 54.29 uT
X: -16.73 Y: -12.82 Z: 48.88 uT
Links